Framework Overview
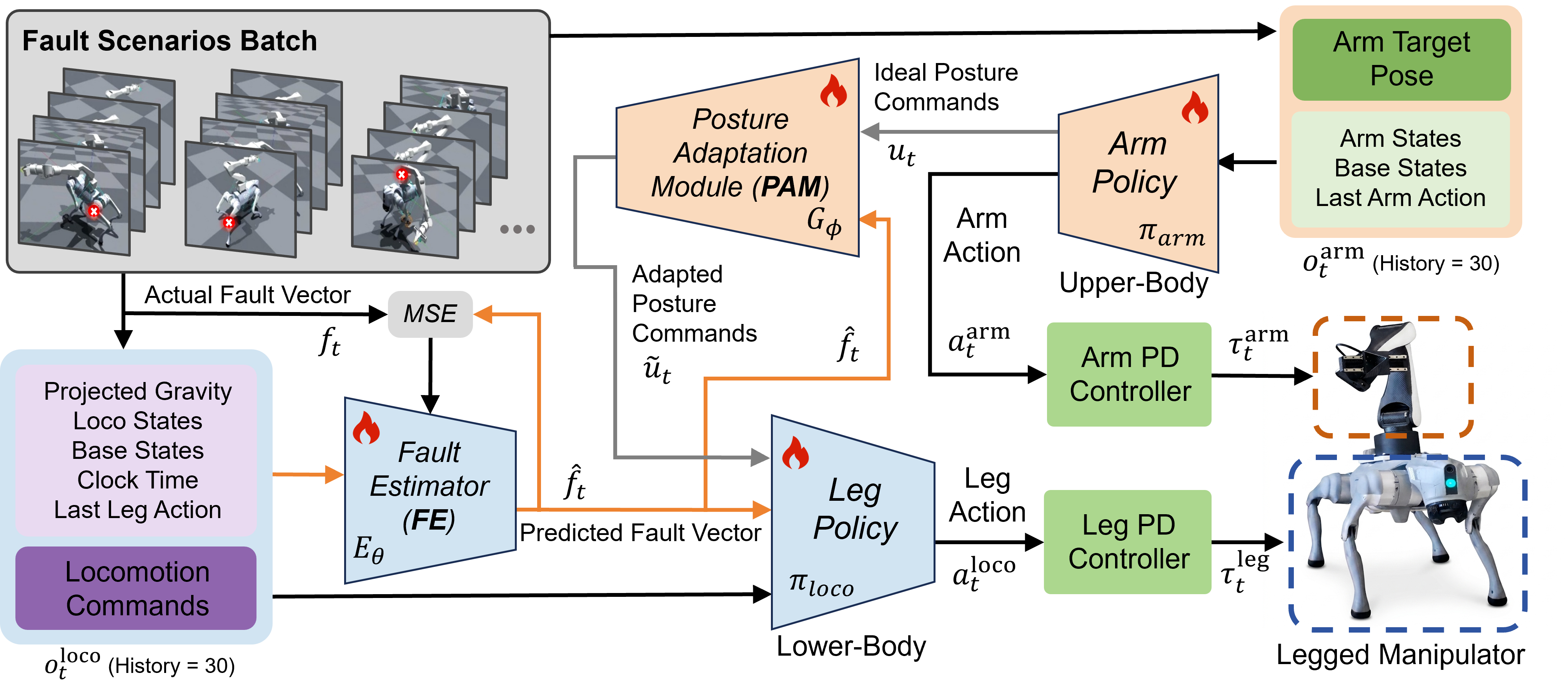
FT-WBC adopts a decoupled architecture consisting of a lower-body leg policy and an upper-body arm policy. The leg policy generates quadruped joint actions from target motion commands and the predicted fault vector, while the arm policy tracks the target end-effector pose and outputs both arm joint actions and a desired base posture plan. The FE predicts joint fault conditions, and the PAM remaps the desired base posture plan into a safe posture command, enabling fault-aware whole-body control under actuator failures.
Real-World Demonstrations
Weakening Faults
Locomotion
FL Hip
FL Calf
FR Thigh
RL Thigh
RR Hip
RR Calf
WBC
FL Hip
FL Calf
FR Thigh
RL Thigh
RR Hip
RR Calf
Pick and Place
FL Hip (side view)
FL Thigh (side view)
RL Calf (side view)
FL Hip (front view)
FL Thigh (front view)
RL Calf (front view)
Locked Faults
Locomotion
FL Hip
FR Thigh
FL Calf
RR Hip
RL THIGH
RR Calf
WBC
FL Hip
FL Calf
FR Thigh
RL Thigh
RR Hip
RR Calf
Pick and Place
RL Hip (side view)
RL Thigh (side view)
FL Calf (side view)
RL Hip (front view)
RL Thigh (front view)
FL Calf (front view)